VERSO UN SENSORE TATTILE SOFT IN GRADO DI INDIVIDUARE IL CONTATTO/DISTACCO CON UN OGGETTO E LE CARATTERISTICHE DI UNA SUPERFICIE
È una nuova frontiera nello sviluppo di un sensore tattile soft, in grado non solo di adattarsi alla forma di vari sistemi robotici, ma anche di rilevare il contatto/distacco con l’oggetto e le caratteristiche della superficie con cui entra in contatto. I progressi nello studio sul tatto artificiale sono stati presentati in uno studio pubblicato sulla rivista Nanomaterials, frutto della collaborazione tra un gruppo di docenti e ricercatori provenienti dall’Istituto di BioRobotica della Scuola Superiore Sant’Anna e dal Dipartimento di Eccellenza in Robotics & AI, dal Laboratorio NEST della Scuola Normale Superiore, dal Dipartimento di Ingegneria e Geologia dell’Università di Chieti-Pescara, dall’Istituto di Robotica ed Automazione dell’Università di Poznan e dall’Istituto Indiano di Tecnologia.
Grazie alle collaborazioni nate all’interno dei progetti di ricerca MOTU e SENSE-RISC, finanziati da Inail, e del progetto PARLOMA, finanziato dal Ministero dell’Istruzione, dell’Università e della Ricerca, il sensore tattile artificiale potrà essere utilizzato in ambiti differenti, come la robotica collaborativa per Industria 4.0, lo sviluppo di protesi artificiali, la robotica medica per diagnostica o chirurgia, e la robotica di soccorso per gli interventi della protezione civile in ambienti di calamità naturale.
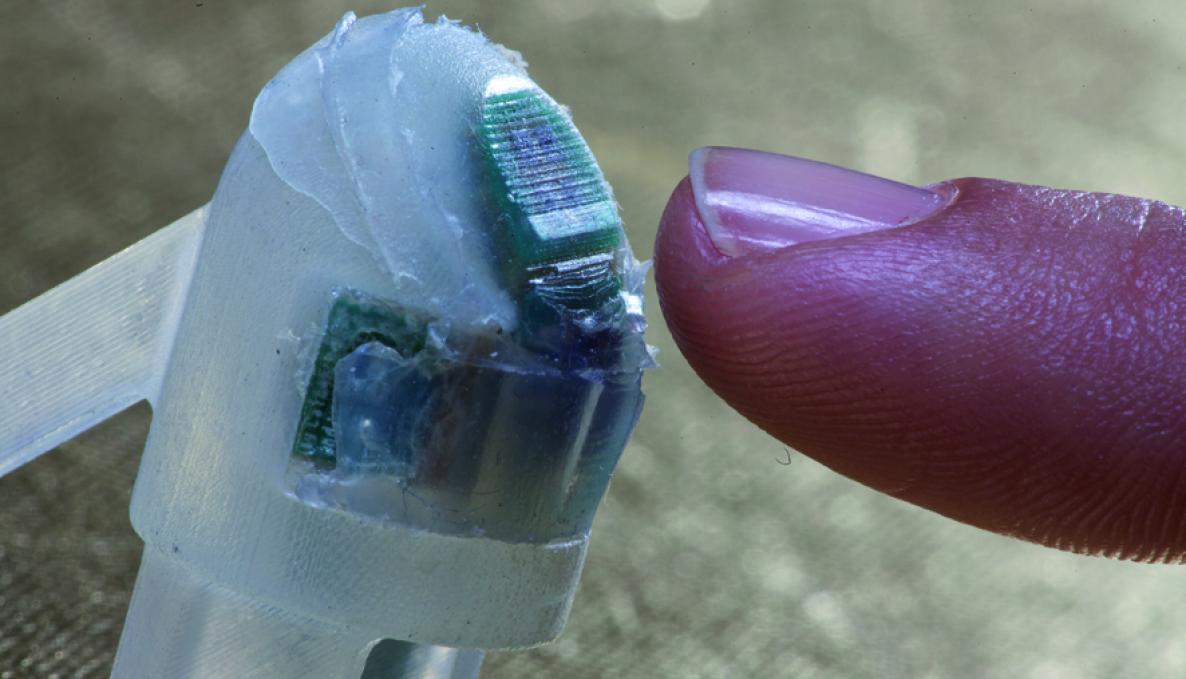
Lo studio tratta dello sviluppo e della caratterizzazione di un sensore tattile, fabbricato a partire dalla crescita di nanomateriali piezoelettrici su un materiale flessibile. Il sensore rileva stimoli di forza e vibrazioni a varia frequenza e li converte in segnali elettrici di tensione, simulando il comportamento dei meccanorecettori della pelle. Il dispositivo può quindi fornire informazioni sull’interazione con un oggetto (contatto/distacco, intensità della forza di contatto) e sulle caratteristiche della superficie. Le nuove tecniche di fabbricazione descritte nello studio consentono di semplificare il processo di sviluppo di questi dispositivi, per una produzione più efficiente e flessibile.
“Il progresso nelle nanotecnologie – dichiara Ilaria Cesini, post doc dell’Istituto di BioRobotica e prima firma dello studio – ha aperto nuove frontiere nello sviluppo di sensori, consentendo di sfruttare le proprietà fisiche e chimiche dei nanomateriali su macro-scala. In particolare, nel nostro studio abbiamo fabbricato un sensore tattile capace di convertire stimoli meccanici in segnali elettrici tramite la funzionalizzazione di superfici flessibili con nanostrutture piezoelettriche. Per rendere possibile ciò, abbiamo messo a punto un processo di fabbricazione a basso costo e veloce che potrebbe aprire la strada a una produzione di massa di sensori tattili soft”.
“Per fabbricare la parte sensibile dei dispositivi abbiamo creato dei prismi a base esagonale grandi (si fa per dire) pochi miliardesimi di metro, attraverso semplici reazioni chimiche”, spiega il Prof. Alessandro Fraleoni Morgera, da poco in forza al Dipartimento di Ingegneria e Geologia dell'Università G. D'Annunzio di Chieti-Pescara. “Questa tecnologia esisteva già ma richiedeva una serie di passaggi obbligati che rallentavano il processo generale di fabbricazione. Il nostro studio ha permesso di elaborare una tecnica più semplice e più rapida, che permetterà la crescita di questi nano-prismi anche sulle superfici flessibili, necessarie alla creazione di una vera pelle artificiale”.
“Lo sviluppo di sensori tattili innovativi - dichiara il Prof. Calogero Oddo, responsabile del Neuro-Robotic Touch Lab dell'Istituto di BioRobotica della Scuola Superiore Sant'Anna e coordinatore dello studio - ha prospettive di applicazione nelle protesi bioniche per il recupero parziale di sensazioni in persone che hanno perso un arto, nella telepalpazione in robotica medica per diagnostica o chirurgia, nella robotica di soccorso per interventi di protezione civile, e nella robotica collaborativa per condividere spazio operativo e attività tra robot, ambiente e persone”.
Dettagli dello studio: Ilaria Cesini, Magdalena Kowalczyk, Alessandro Lucantonio, Giacomo D’Alesio, Pramod Kumar, Domenico Camboni, Luca Massari, Pasqualantonio Pingue, Antonio DeSimone, Alessandro Fraleoni Morgera e Calogero Maria Oddo, Seedless Hydrothermal Growth of ZnO Nanorods as a Promising Route for Flexible Tactile Sensors, Nanomaterials 2020, 10(5), 977.



